
激光跟踪仪多台联动同步测量解决方案
发布时间:2021-03-19
API Radian Pro激光跟踪仪配备了ADM(绝对激光)与IFM(干涉激光)双激光;其中,IFM干涉激光是长度计量的标准,可为整个测量方案提供高精度保障及数据溯源。

方案特征
1、实现目标6维(6DoF)动态高精度监测;
2、大幅提升目标位置测量精度。
系统构成
1、API Radian Pro激光跟踪仪
API Radian Pro激光跟踪仪配备了ADM(绝对激光)与IFM(干涉激光)双激光;其中,IFM干涉激光是长度计量的标准,可为整个测量方案提供高精度保障及数据溯源。
2、TTL(或其它方式的)数据同步系统
数据同步系统是多台联动激光跟踪仪的同步触发装置,由API专门提供的信号发生器同时给多台联动的激光跟踪仪提供触发信号,使这些激光跟踪仪得到同步控制,确保它们在同一时间采集数据。同步的激光跟踪仪的数量可以由客户按实际状况而定。
3、同步信号处理专用测量软件
该软件是API自主研发的用于处理分析多台联动激光跟踪仪反馈数据的专业测量软件。API同步信号处理专用软件可广泛满足用户的使用需求,具体包括:实现对多台激光跟踪仪坐标系统的统一、实现被测目标坐标的定义、实现多台激光跟踪仪动态测量数据的组合分析(比如动态姿态角度的测量等)。
典型应用案例
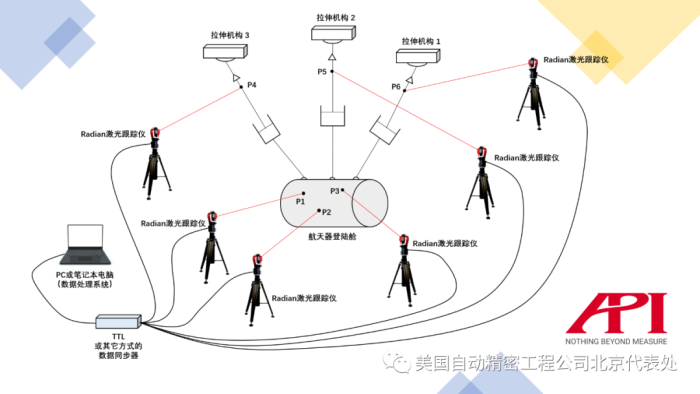
图1:航天器登陆舱6维姿态检测解决方案示意图(多台激光跟踪仪联动)
1、航天器登陆舱姿态的6维(6DoF)监测、控制与实时调整
测量目的:
航天器登陆舱在登陆过程中受到引力、气流等诸多因素影响,会造成晃动。实验中,用拉伸机构模拟造成登陆舱晃动的力,用多台激光跟踪仪同步监测各参照点之间的数学关系,从而得到科学数据,并依照数据调整登陆舱底部助推火箭喷射的力度和方向,使得登陆舱最终可以稳定着陆。
测量过程:
(1)在登陆舱上设置P1、P2、P3三个点,利用三台Radian Pro激光跟踪仪对其在空间的姿态进行实时跟踪测量监测;
(2)利用另外三台Radian Pro激光跟踪仪,对位于拉伸机构上的P4、P5、P6三个点进行实时跟踪监测;
(3)通过数据同步器,对六台激光跟踪仪同时发布测量指令,分别在同一时间采集6个参照点的相应数据,并将数据传输到数据处理系统(PC或笔记本电脑);
(4)利用同步测量软件对数据进行分析,并计算出各个参照点之间的数学关系,随即依照数据指导火箭推力力度和方向的调整。

图2:跟踪仪多台联动监测工业机器人动态精度(6DoF)
2、工业机器人6维动态精度的实时监测
测量目的:
对工业机器人的精度进行6维动态追踪监测,从而更好地评估工业机器人在其运动路径上各个位置的空间精度,并依据数据对机器人进行相应的数据补偿与工作路径优化。
测量过程:
在工业机器人末端安置跟踪仪靶球支架,并在支架上布置3个靶球(SMR),三台激光跟踪仪各自跟踪一个靶球,并对该靶球在机器人运动过程中的各个位置进行实时动态采集测量。采集到的数据反馈至PC或笔记本电脑进行计算,并作为该机器人标定补偿的数据支撑。
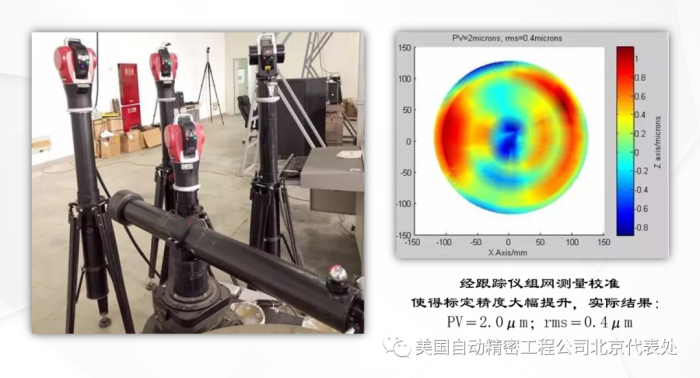
图3:使用四台激光跟踪仪实现对大型非球面镜的超高精度检测
3、对待测目标极致高精度的测量检测
测量目的:
进一步提升对目标物的测量精度。
激光跟踪仪作为一种微米(μm)级别精度的测量仪器,其测量精度已得到众多高精尖制造行业或研究所的认可,并已广泛应用于全球各重点工程和国家项目中。单台激光跟踪仪已经可以实现超高精度的测量,但在某些对测量精度有着更加严苛要求的精密工程中,我们可以使用多台激光跟踪仪联动测量的方式,让测量精度进一步提升。
单个激光跟踪仪的测量误差90%来自于其角度误差;多台跟踪仪联动测量解决方案中,我们使用多台激光跟踪仪同时测量一个点,从而基于各跟踪仪自身的位置以及对该点位置的测量数据,综合计算分析出该点的空间位置,并最大程度地避免了跟踪仪的角度误差,得到相对更精准的测量数据。
测量实例:
中国科学院光电技术研究所就使用这种“四台激光跟踪仪联动测量”的方法,对其大型非球面镜进行了在位检测,并成功将测量不确定度从U=11.8″提升至了U=2.4″(参考文献:中国光学工程学会,《中科院光电所在大型非球面镜在位检测技术研究中取得突破》,微信号:CHINA-HI-TECH-IA,https://mp.weixin.qq.com/s/xUmnxtgVhsz5izWKe1HtLA),精度提升达将近5倍。
此研究工作还得到了中国国家“863”计划、“西部之光”计划的资助。
结论
以上理论及典型应用案例,充分证实了激光跟踪仪多台联动测量解决方案在实现目标6维动态高精度监测以及大幅提升目标位置测量精度方面的能力及可操作性。
测试社区